Verkehrsmanagement mit der VDA 5050
Die Kommunikation zwischen fahrerlosen Fahrzeugen (AGV, FTS oder auch AMR) und einer zentralen Leitsteuerung wird mittlerweile von der VDA 5050 geregelt. Sie stellt ein standardisiertes Protokoll per MQTT dar, welches von kompatiblen Fahrzeugherstellern und Leitsystemen unterstützt wird. Einer der Hauptfunktionen ist es, eine heterogene Fahrzeugflotte unterschiedlicher Hersteller auf der gleichen Fläche zu steuern. Damit entscheidet nunmehr das Leitsystem, welches Fahrzeug welchen Auftrag zu welchem Zeitpunkt bearbeitet. Nimmt man den herstellerspezifischen Flottenmanagern diese Aufgabe, muss sich die zentrale Leitsteuerung auch um das Verkehrsmanagement kümmern. Also der Aufgabe, welches Fahrzeug an Kreuzungen oder Engstellen Vorfahrt hat und welches warten muss.
Entsprechend der VDA 5050 basiert die Verkehrssteuerung auf einem Knoten-Kanten Modell, welches die gesamte Werksfläche modelliert, auf der fahrerlose Fahrzeuge fahren sollen. Knoten stellen dabei Punkte dar, die entweder als Ziel angefahren werden können oder als Zwischenknoten für Kreuzungen und Kurven verwendet werden können. Kanten verbinden immer jeweils zwei Knoten und können ungerichtet oder gerichtet sein. Das untere Beispiel zeigt das Modell einer T-Kreuzung, wie es auch vom FlexGuide und dem AGV-Hub verwendet wird. Der Fahrweg wird durch jeweils zwei gegenläufige gerichtete Kanten abgebildet, da Fahrzeuge hier aneinander vorbeifahren können. Die Kreuzung ist durch eine Art Mini-Kreisverkehr mit ebenfalls gerichteten Kanten abgebildet.
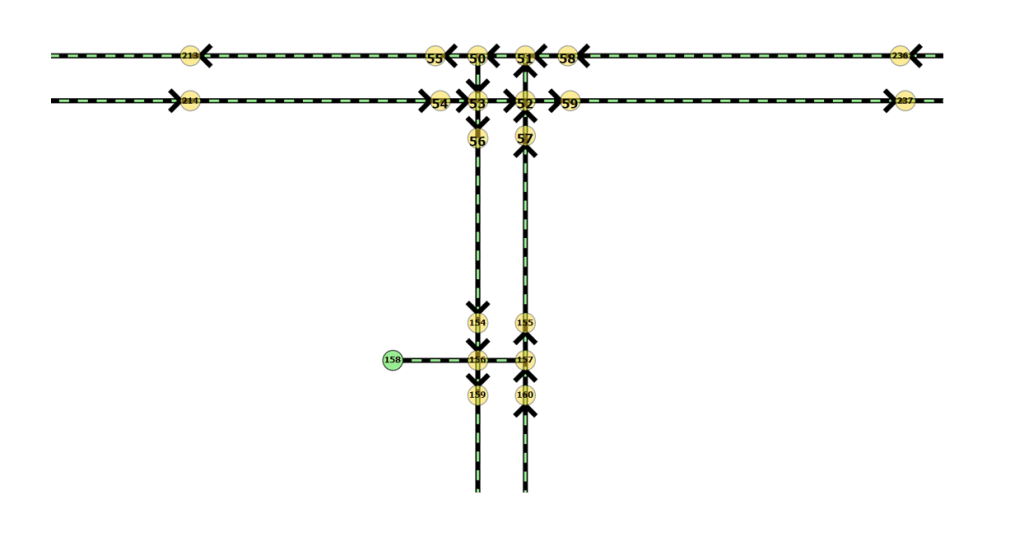
Das Netzwerk aus Knoten und Kanten ist von zentraler Bedeutung für die Leitsteuerung. Durch Wegfindungsalgorithmen (z.B. dem Dijkstra-Algorithmus) kann sowohl der kürzeste Weg zwischen zwei beliebigen Knoten, als auch alle Zwischenknoten unter Berücksichtigung der Einbahnstraßen ermittelt werden. In Verbindung mit den aktuell zugewiesenen Aufträgen kennt das Leitsystem also die Wege, die alle fahrerlosen Fahrzeuge befahren werden.
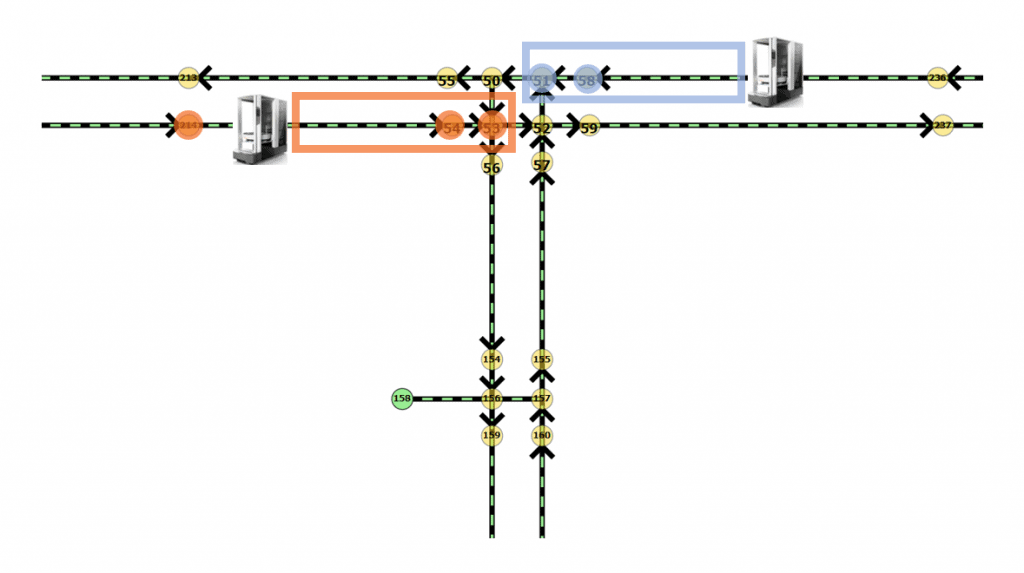
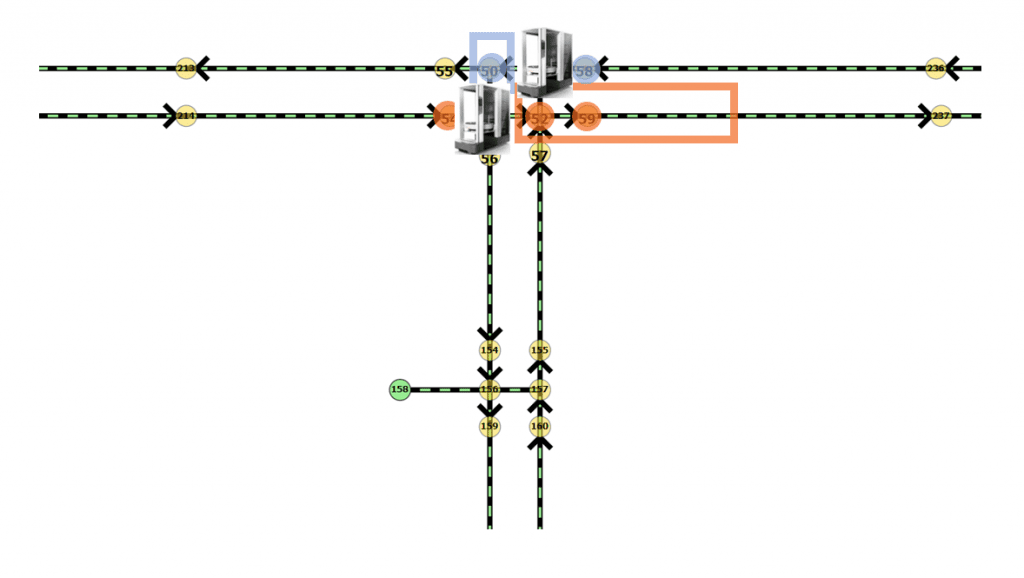
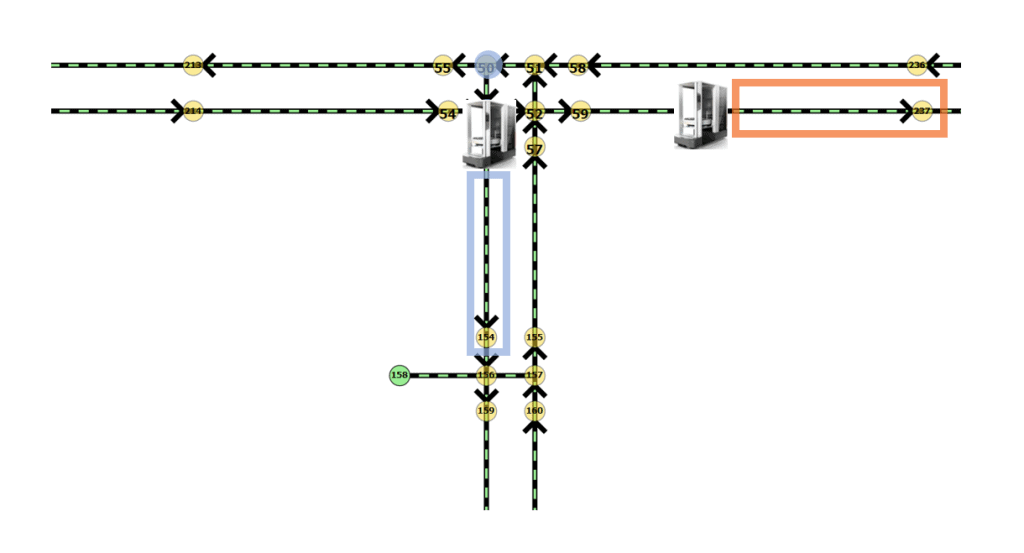
Beispiel VDA 5050 Verkehrsmanagement:
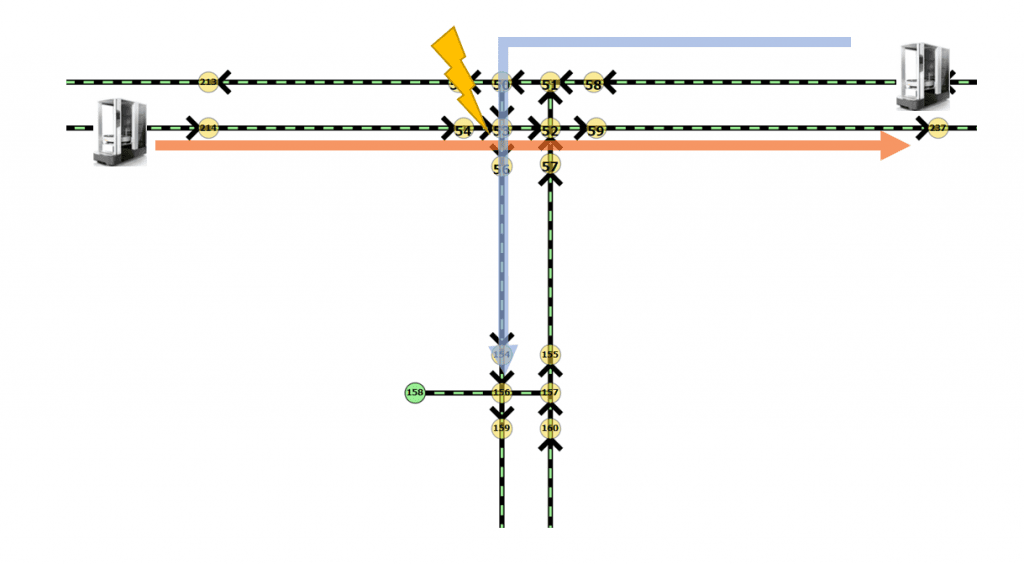
In diesem Beispiel möchte das linke Fahrzeug (orange) durch die Kreuzung geradeaus fahren, das rechte Fahrzeug (blau) möchte an der Kreuzung links abbiegen. Dadurch ergibt sich automatisch ein Knoten, der auf beiden Wegen liegt und zu einem Zusammentreffen führen kann, den das Leitsystem und dessen Verkehrsmanagement behandeln müssen.
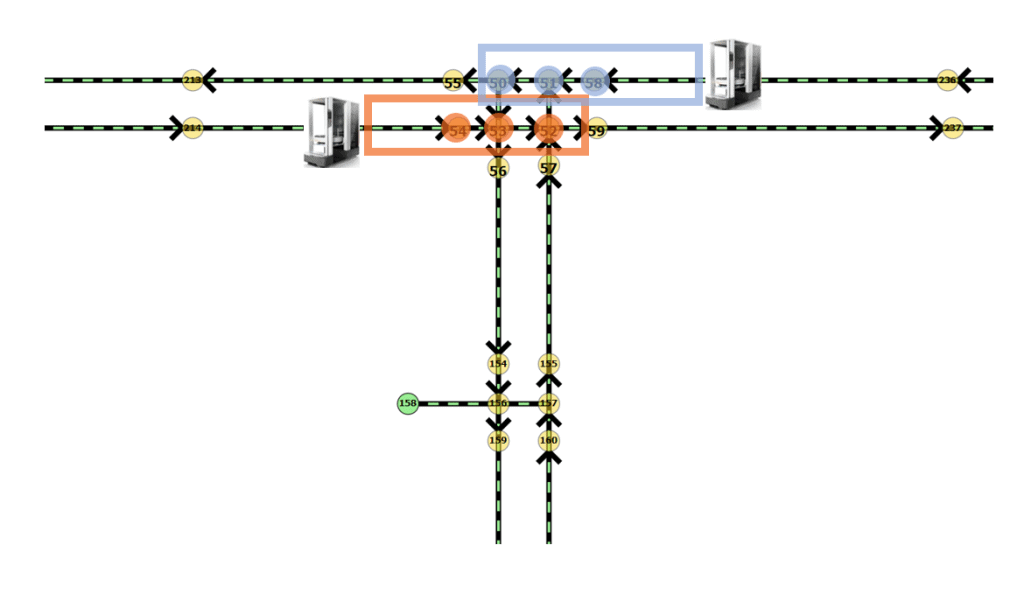
Das Verkehrsmanagement baut nun ein Fenster auf dem Weg vor dem Fahrzeug auf, welcher eine gewisse Länge hat (bspw. 10 Meter). In diesem Fenster sperrt die Leitsteuerung für jedes Fahrzeug die darin liegenden Knoten, sofern sie nicht bereits gesperrt sind. Die VDA 5050 basiert dabei auf dem sog. „Base-Horizon Konzept“. Dieses ist ganz einfach erklärt: die Knoten im „Base“ sind diejenigen, die für das Fahrzeug freigegeben sind und gefahren werden dürfen. Dagegen sind die Knoten im „Horizon“ noch nicht freigegeben und beinhalten im Grunde den Rest der Strecke bis zum Ziel.
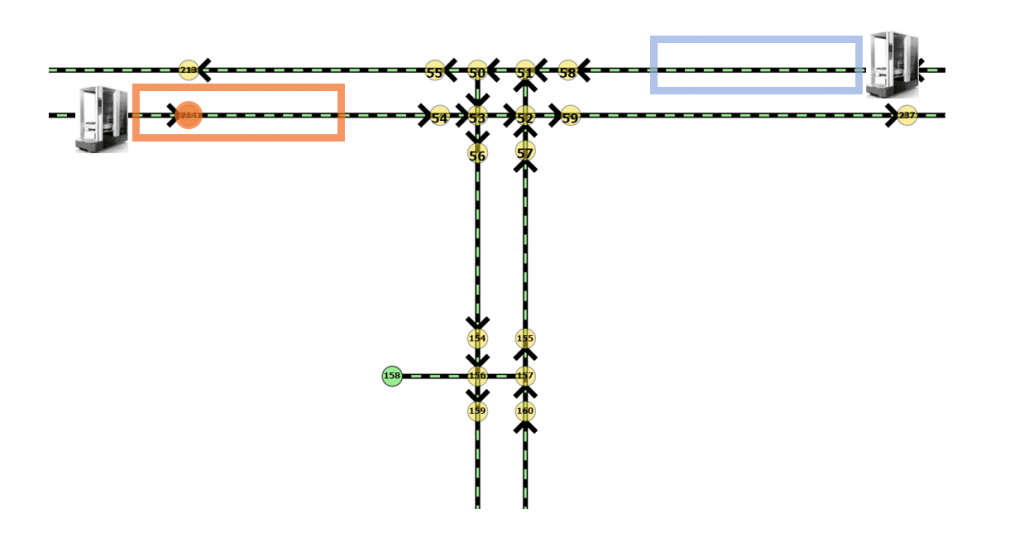
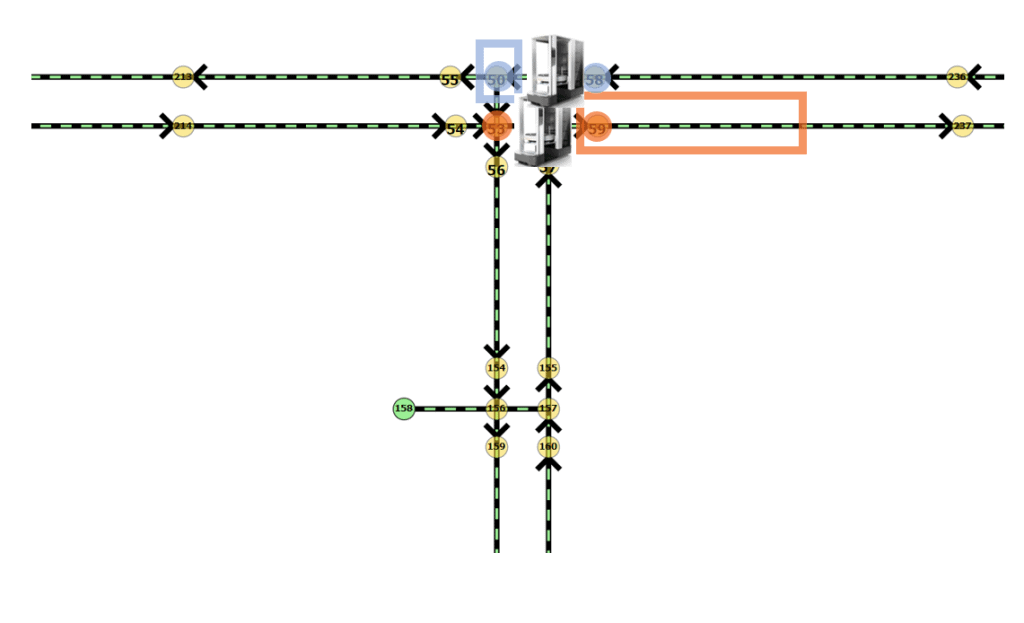
Während die Fahrzeuge weiterfahren, melden sie dem Leitsystem permanent ihre aktuelle Position und die nächsten erreichten Knoten. In der Verkehrssteuerung werden nun weiter Knoten blockiert, die im Fenster der Fahrzeuge liegen.
Gleichzeitig werden Knoten, die das Fahrzeug bereits befahren hat, wieder freigegeben. Hierbei muss die Länge des Fahrzeug und ggf. von gezogenen Anhängern berücksichtigt werden, damit die Knoten nicht zu früh freigegeben werden.
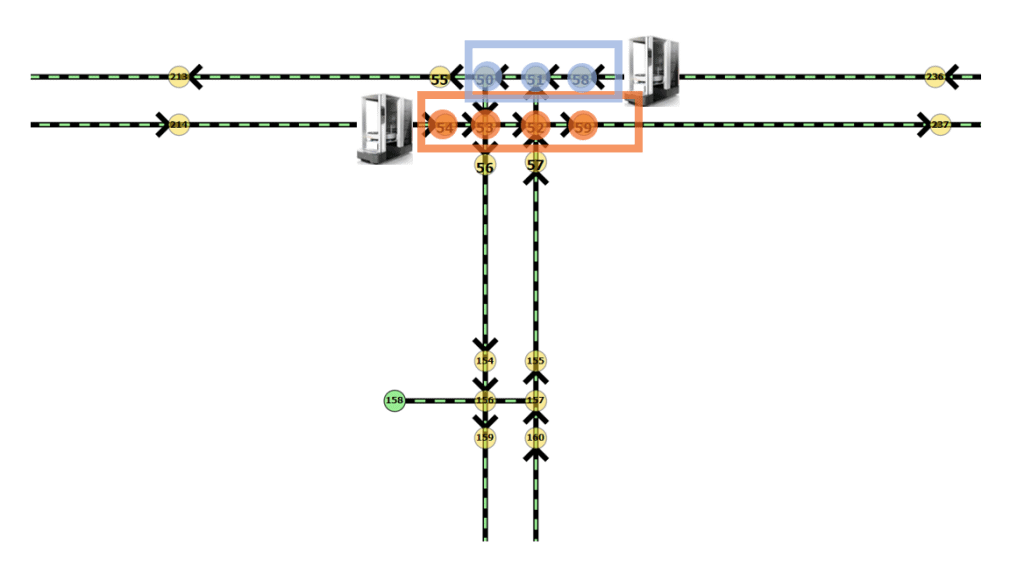
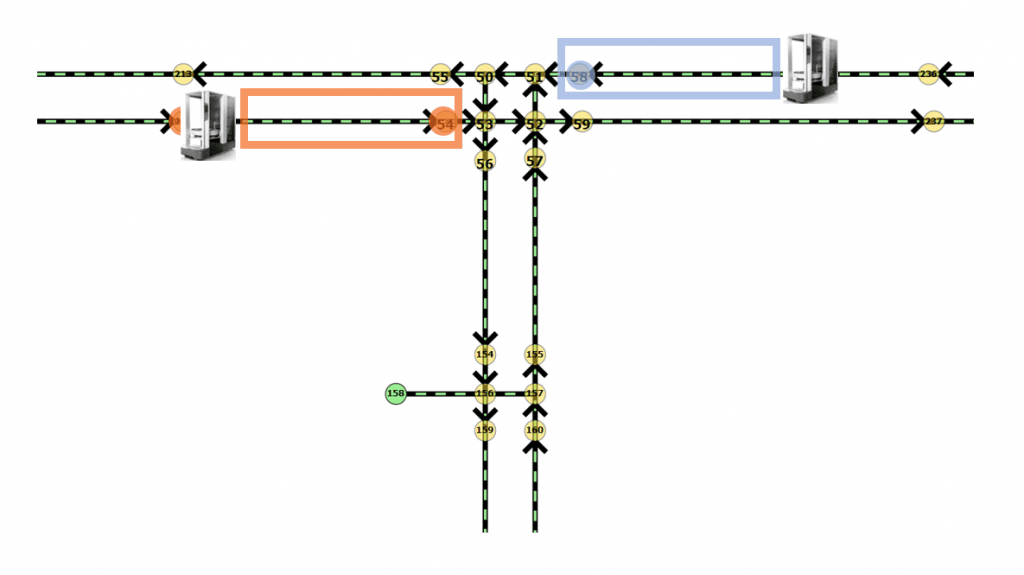
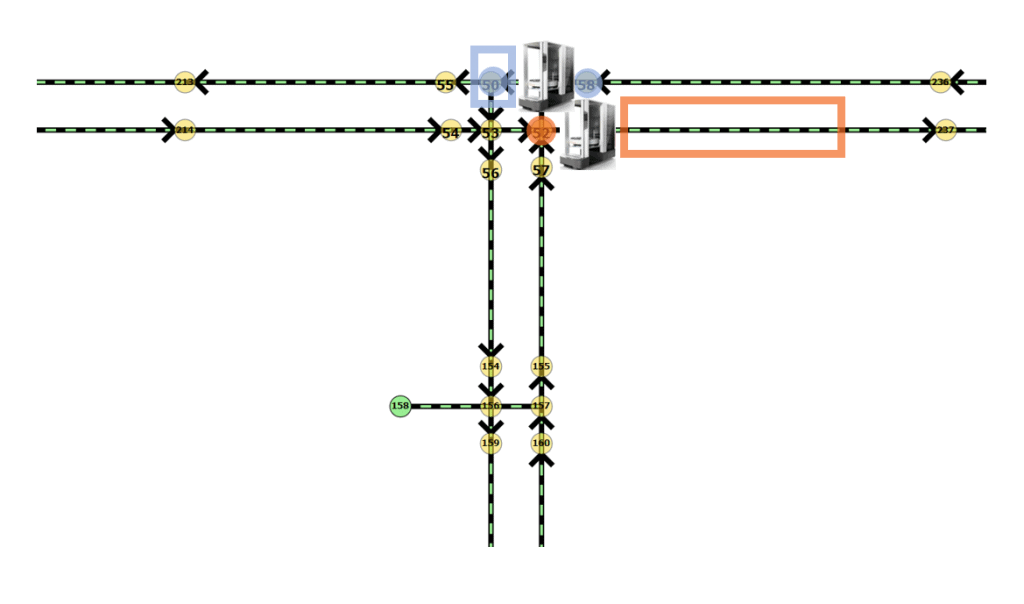
Merkt die Verkehrssteuerung nun, dass im Fenster eines Fahrzeugs (im Beispiel das blaue) ein Knoten reserviert werden muss, der bereits blockiert ist, kann dieser nicht in die „Base“ des Fahrzeugs aufgenommen werden. Das Fahrzeug erhält also nur den Weg bis zum letzten freigegebenen Knoten, des es befahren darf und fährt zunächst bis dorthin.
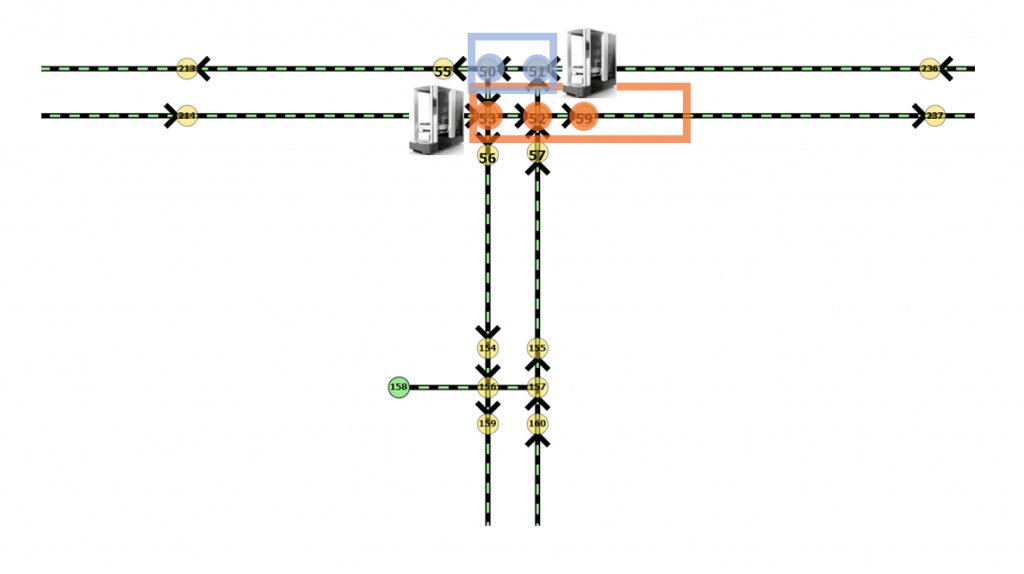
Ist das Fahrzeug am letzten freigegebenen Knoten angekommen, muss es anhalten und auf Freigabe vom Leitsystem warten.
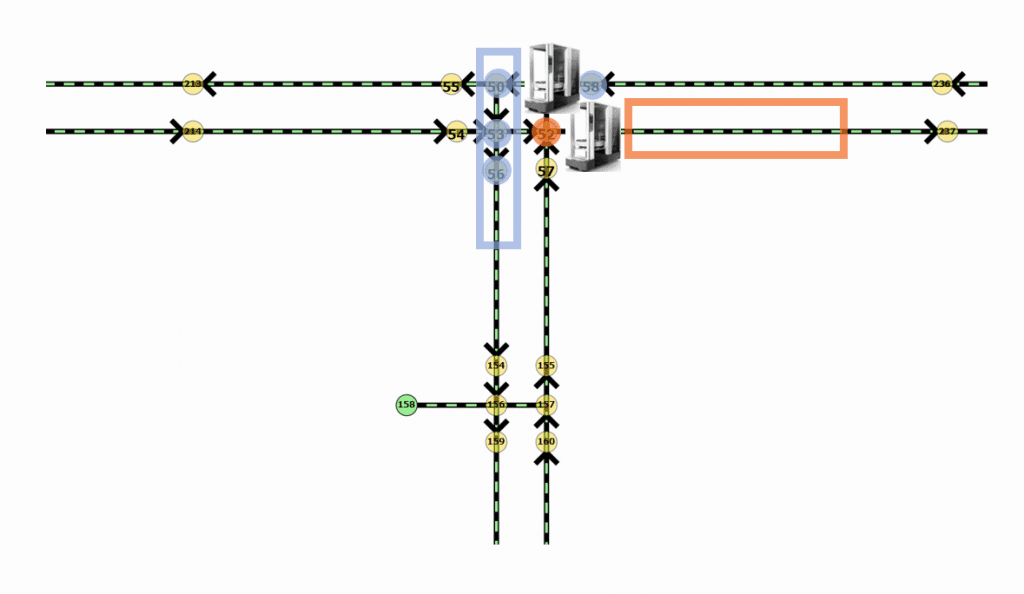
Das andere Fahrzeug (rot) fährt nun durch die Kreuzung und gibt den Knoten frei. Die Verkehrssteuerung merkt dies und reserviert nun die Knoten im Fenster für das blaue Fahrzeug und fügt diese dem „Base“ hinzu. Das blaue Fahrzeug kann jetzt durch die Kreuzung fahren.
Fazit:
In diesem Artikel wurde ein einfaches Beispiel für die VDA 5050 Steuerung nach dem „First come first serve“ Prinzip an einer Kreuzung gezeigt. Im realen Einsatz spielen hier noch weitere Faktoren eine Rolle. Zum Beispiel kann das Leitsystem anhand der Priorität der Aufträge beider Fahrzeuge entscheiden, welches warten soll. Des Weiteren muss die Verkehrssteuerung den gesamten Knoten-Kanten Graphen berücksichtigen. Damit Sackgassen oder längere Engstellen erkannt werden, um nicht zwei Fahrzeuge in solche Bereiche zu schicken, die sich zwangsläufig irgendwann gegenseitig blockieren würden. Nicht zuletzt kann das Leitsystem auch die gesamte Auftragslage sowie Fahrzeugpositionen soweit berücksichtigen, dass es gar nicht erst zu Wartezeiten oder Engstellen kommt. Dies könnte beispielsweise durch Zuweisen von alternativen Wegen oder Zuweisen von anderen Aufträgen berücksichtigt werden.

Autor – Christian Zerbes
Head of Transport Systems
Im Rahmen seiner Tätigkeit bei Flexus setzt er erfolgreich Projekte im Bereich Transport Systems um. Projekte reichen von der Implementierung eines einfachen Staplerrufsystems bis zur volldynamischen Steuerung unterschiedlichster Ressourcen wie Routenzüge, Stapler oder fahrerlose Transportsysteme
Das könnte Sie auch interessieren: