Wenn es um die moderne Intralogistik geht, sind AGVs (Automated Guided Vehicle) nicht mehr wegzudenken. Diese bewegen Ware von A nach B, ohne dass sie noch von einem Menschen gesteuert werden müssen. Damit die Fahrzeuge nahtlos in die bestehende Prozesslandschaft integriert werden können, sollten sie von einer übergeordneten Leitsteuerung, bestenfalls per VDA 5050, gesteuert werden. Die Leitsteuerung hat die Aufgabe, die anfallenden Aufträge, die bspw. aus einem ERP System kommen können, mit den vorhandenen Fahrzeugen möglichst effizient abzuarbeiten. Aber wie viele Fahrzeuge werden benötigt und welche Anzahl müssen sich Unternehmen für ihre vorgesehenen Prozesse anschaffen?
Diese Fragen kann eine AGV Simulation eines möglichst realistischen Szenarios beantworten. Der Grundgedanke ist, dass virtuelle Fahrzeuge in einer stark beschleunigten Simulation ein Szenario an Aufträgen abarbeiten und sich daraus KPI zu Pünktlichkeit, Auslastung und Leerfahrten ergeben. Dabei variiert man die Anzahl der zur Verfügung stehenden Fahrzeuge und vergleicht die KPI, sodass man eine Aussage treffen kann.
AGV-Hub mit Simulationstool bringt Licht ins Dunkel
Innerhalb des AGV-Hubs von Flexus, welches auf der SAP-BTP läuft, kann man mit dem Simulations-Add-On genau diese Aussagen treffen. Dabei wird zunächst – wie in einem normalen Projekt auch – das Areal grafisch mit dem RouteOptimizer erstellt. Auf der Hintergrundkarte des Kunden werden Knoten und Kanten gesetzt und mit Abhol- und Andienstationen sowie den Fahrwegen versehen. Wichtig hierbei ist der Maßstab der Karte, damit ein realistisches Ergebnis hinsichtlich der benötigten Zeit für die gefahrenen Strecken berechnet werden kann.
Als weiteren Input benötigt man die Auftragsdaten, die simuliert werden müssen. Je nach bisherigem System stehen die Daten in unterschiedlicher Form zur Verfügung. Im besten Fall nutzt der Kunde bereits das FlexGuide Transportleitsystem und kann auf Ist-Daten im Livebetrieb zurückgreifen. Alternativ könnten Buchungen aus SAP-Modulen wie WM, EWM oder PP verwendet werden, um die Daten zu generieren. Jeder Auftrag verfügt über eine Quelle und Senke und ggf. über eine Auftragsart, die unterschiedlich priorisiert werden muss. So könnten Versorgungen der Produktion wichtiger sein als die Entsorgung von Leergut.
Ein wichtiger Punkt in der Simulation ist, dass nicht alle Aufträge sofort zur Verfügung stehen, sondern wie im täglichen Betrieb erst nach und nach ins System kommen. Daher sollte jeder Auftrag über einen Anlagezeitpunkt verfügen, wann er im (virtuellen) Zeitstrahl dem System zur Verfügung steht. Außerdem können die Aufträge mit weiteren Daten angereichert werden:
- Gibt es einen Fälligkeitszeitpunkt, wann der Auftrag abgeschlossen sein muss?
- Hat der Auftrag einen besonderen Ladungsträgertyp, der nur von einem speziellen AGV-Typ gefahren werden kann?
Die Aufträge sollten den Zeitraum von mindestens einem gesamten Arbeitstag abdecken, besser noch eine ganze Woche, um Schwankungen unter den einzelnen Wochentagen separat betrachten zu können.
Einrichten der AGV Simulation: Bilden Sie reale Situationen ab
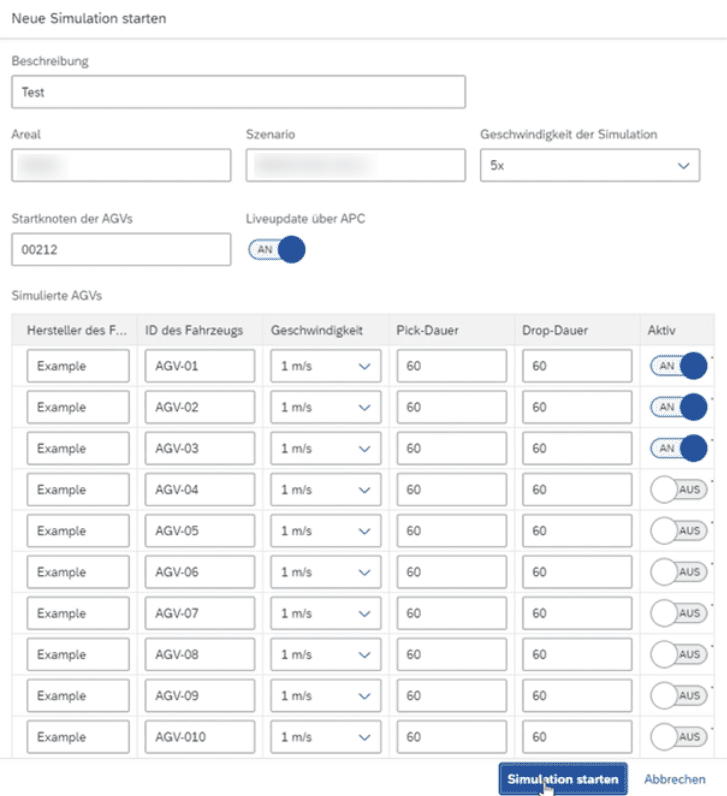
Jetzt kann die eigentliche Simulation gestartet werden. Dafür müssen noch einige Parameter festgelegt werden. Zunächst wählt man eine Anzahl von Fahrzeugen, mit denen die Simulation ausgeführt werden soll. Pro Fahrzeug lässt sich die Geschwindigkeit, die Dauer zum Aufnehmen und die Dauer zum Absetzen eines Auftrags einstellen. Außerdem kann die Geschwindigkeit der Simulation gewählt werden.
Allerdings gilt es, hier Vorsicht walten zu lassen: durch die Verwendung des tatsächlichen MQTT Brokers für die VDA 5050 Nachrichten spielt die Kommunikationsdauer zwischen Simulation und MQTT Broker eine Rolle. Je höher die Geschwindigkeit, desto größer ist der Einfluss der Wartezeit auf die Kommunikation beider Systeme. Hier hat sich ein Wert von „mal fünf“ als guter Mittelwert erwiesen.
Let’s start: Simulieren Sie echte Fahrten in Ihrem Lager
Sobald die Simulation startet, wird für jedes Fahrzeug ein virtueller Agent erstellt, der die Aufgabe hat, das Fahrzeug innerhalb des MQTT Brokers zu simulieren. Das bedeutet, dass sich der Agent als Teilnehmer am MQTT Broker anmeldet und vom Leitsystem darüber Aufträge erhält. Sobald er den Auftrag erhalten hat, zum Von- oder Nach-Platz zu fahren, simuliert er seine Fahrt anhand des Wegenetzwerks mit der eingestellten Geschwindigkeit.
Der Agent meldet sich dabei sowohl laufend mit seiner X- / Y-Position am Leitsystem als auch das Erreichen jedes Zwischenknotens. Das Leitsystem wiederum steuert jetzt wie im Livebetrieb auch den Verkehr an Kreuzungen oder Sackgassen, indem es Knoten für AGVs freigibt oder die Freigabe verweigert, weil sich ein anderes Fahrzeug im entsprechenden Bereich befindet. Die Durchführung des Verkehrsmanagements ist ein wichtiger Punkt in der Simulation, da sich durch wartende Fahrzeuge an Kreuzungen natürlich die Fahrzeiten erhöhen, die sich wiederum in den Endergebnissen widerspiegeln.
Die Entscheidung, welches Fahrzeug welchen Auftrag zu welchem Zeitpunkt erhält, wird mit denselben Algorithmen wie im Livebetrieb durchgeführt. Dabei werden die Customizingparameter des FlexGuide Transportleitsystems innerhalb von SAP verwendet. Mit diesen kann man die Gewichtung zwischen Minimierung von Leerfahrt, Einhaltung von Fälligkeiten sowie möglichen Doppelspielen einstellen. Diese Vorgehensweise ist wichtig, um die Simulation so nah an der Realität und so glaubwürdig wie möglich darzulegen. Die Verwendung von externen Simulationstools würde anderen Regeln der Zuweisung folgen und wäre daher nicht machbar gewesen. Aktuell wurde das Batteriemanagement nicht implementiert, da es schwierig ist, die Lade- und Entladegeschwindigkeit festzulegen. Allerdings wurde eine Funktion implementiert, die die AGVs zu einem vordefinierten Ladeplatz leitet, wenn keine Aufträge im Pool vorhanden sind.
Simulationsanalyse: Diese Parameter können in Zukunft bei Ihnen optimiert werden
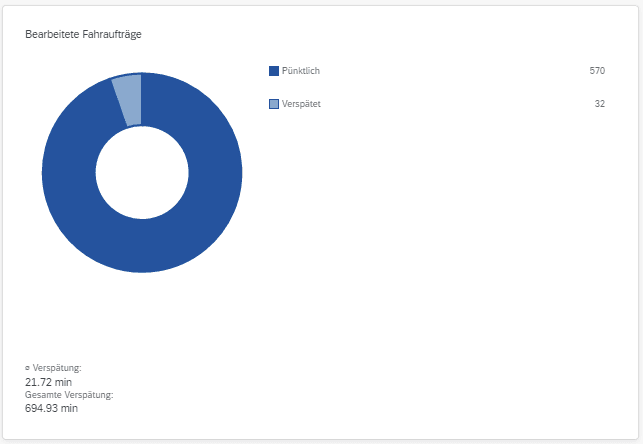
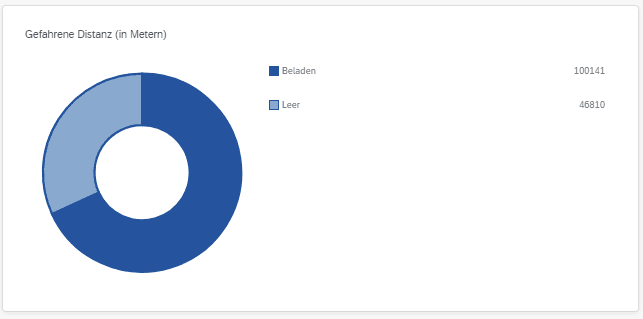
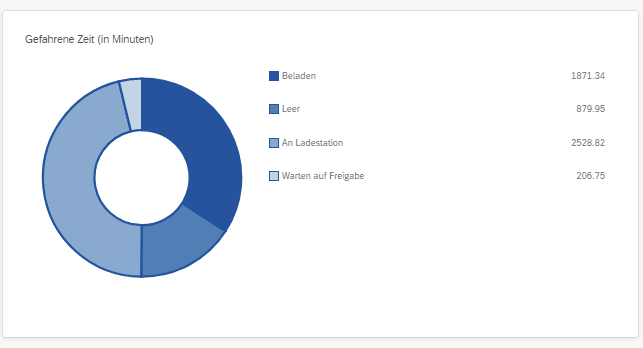
Ist die Simulation durchgelaufen, erhält man als Ergebnis eine Vielzahl von KPIs, jeweils für die Gesamtflotte und jedes AGV einzeln. In den KPIs ist die Anzahl der pünktlichen Aufträge enthalten, sofern diese über einen Fälligkeitszeitpunkt verfügen. Außerdem wird die Fahrstrecke gemessen und in leerer und beladener Fahrt unterteilt. Auch zeitlich wird gemessen, wie lange das AGV leer oder beladen gefahren ist und wie lange es sich an der Ladestation befunden hat. Besonders interessant ist dabei die Zeit, die das Fahrzeug auf Freigaben des Verkehrsmanagements wartet, da ein anderes Fahrzeug die Kreuzung blockiert.
Die KPIs für verschiedene Simulationen mit verschiedenen Parametern wie der Anzahl der AGVs lassen sich nun vergleichen. So steigt beispielsweise die Anzahl der pünktlichen Aufträge mit mehr Fahrzeugen, allerdings entstehen dadurch mehr Leerfahren, mehr Standzeit an Ladestationen und auch mehr Wartezeit an Kreuzungen, da das Verkehrsaufkommen allgemein höher ist. Hier gilt es dann zusammen mit Kunden abzuwägen und eine Entscheidung zu treffen, die alle Faktoren berücksichtigt.
Die Simulation bietet in jedem Fall eine Grundlage für diese Entscheidung. Zusätzlich können Kunden, die bereits das AGV-Hub von Flexus einsetzen, durch die Simulation andere Parameter testen und sofort die Auswirkungen erkennen, bevor diese im Live-Betrieb zum Einsatz kommen. So optimieren Sie mit fahrerlosen Transportsystemen (FTS) Ihren Materialfluss!

Autor – Christian Zerbes
Head of Transport Systems
Im Rahmen seiner Tätigkeit bei Flexus setzt er erfolgreich Projekte im Bereich Transport Systems um. Projekte reichen von der Implementierung eines einfachen Staplerrufsystems bis zur volldynamischen Steuerung unterschiedlichster Ressourcen wie Routenzüge, Stapler oder fahrerlose Transportsysteme