Controlling multiple mobile robots from different manufacturers is one of the major challenges in intralogistics today and will become increasingly important in the future. Different manufacturers have specialized vehicles for different uses, allowing customers the flexibility to choose the best vehicle for each scenario.
Since these vehicles are sometimes expected to travel in the same area, it is necessary to implement traffic control that regulates the right-of-way at intersections and bottlenecks so that two vehicles from different manufacturers do not face each other in a dead lock.
For this purpose, the VDA and VDMA have published the now widely used standard interface VDA 5050 in its second version. This is intended to describe the communication between vehicles and a control system, so that vehicles can be connected to a control system more or less by plug and play.
Control all compatible AGV manufacturers
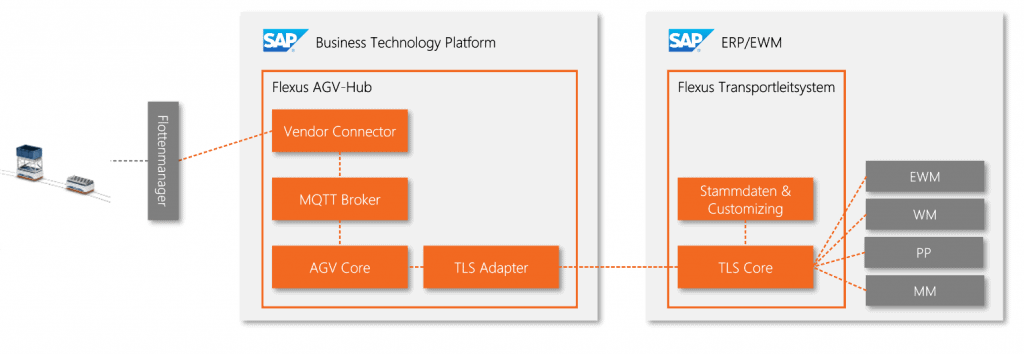
Flexus also offers the AGV Hub as an add-on to the FlexGuide transport control system, a component that supports the VDA 5050 interface. Today, all compatible manufacturers can already be controlled via this. The orders for the vehicles always come from the transport control system, which is fully integrated into an SAP ERP or EWM system. There it generates transport orders from SAP bookings, such as WM transport orders, EWM warehouse tasks or PP confirmations.
Driving jobs are optimized by algorithms and assigned to the vehicle best suited for a job. Criteria such as empty run minimization, adherence to due dates, consideration of manual priorities and many more are taken into account. If the best vehicle for a job is an AGV (including AMR – Autonomous Mobile Robots), it is sent to the AGV Hub and published to the MQTT Broker. Connected vehicles receive the order from this broker and execute it.
Use all standard functions across the board
In addition to VDA 5050-compatible manufacturers, there are also those that have not (yet) implemented the interface. So that these can also be connected to the control system, Flexus has created the possibility of connecting such vehicles or their fleet managers via specific vendor connectors.
These specially programmed modules translate the VDA 5050 messages into the special API calls offered by the manufacturer. At the same time, the status is monitored and again translated into a VDA 5050 message. The advantage of this is that both compatible and non-compatible manufacturers can be controlled via the same interface. This means that all standard functions such as traffic control, load management and order placement also work across the board.
In action: MiR robot from Denmark
As one of the first with this interface, Flexus has now connected the robots from MiR (Mobile Industrial Robots) from Denmark. To make this happen, MiR provided a robot for three weeks that rode in the Flexus offices. In addition, MiR Fleet Manager was used to implement the functions for recording and maintaining the map and creating missions.
The missions had to be rethought. While a motion task in the Flexus control system is always a motion object that is recreated each time it occurs, in MiR a mission is a template that can be scheduled and executed over and over again. The advantage of the missions is that more complex flow logic and the connection of external hardware such as gates, buttons, sensors, etc. can be implemented.
Flexus has now created a mapping between driving jobs and missions with a customizing in the AGV Core, where variable values like the from or to place can also be passed to a mission. While the vehicle is now moving, the coordinates are continuously monitored and written to the MQTT broker as a state message. There, it is then recognized when the vehicle is at the from or to location and the associated travel order can be acknowledged in FlexGuide. It also detects when the vehicle is approaching an intersection through which another vehicle is already traveling. In this case, a command to pause the mission is sent, causing the vehicle to stop. Once the intersection is cleared again, the mission continues and the vehicle moves on.
Goal: Quickly set up AGV guidance system for many manufacturers
In summary, Flexus has managed to connect MiR vehicles to SAP in such a way that they not only receive orders automatically, but can also be combined with other vehicles. In the coming weeks, this connection will be introduced in the first customer projects, which will certainly present new challenges again. In addition, discussions are already underway with other vendors to integrate them both via VDA 5050 directly or with new vendor connectors. The goal is to provide a system that allows customers to set up a running AGV control system within a few days that can be used to control the majority of manufacturers on the market.

Author – Christian Zerbes
Head of Transport Systems
In the course of his work at Flexus, he successfully implements projects in the field of Transport Systems. Projects range from the implementation of a simple forklift call system to the fully dynamic control of a wide variety of resources, such as tugger trains, forklifts or driverless transport systems.